Triage-Roboter sollen in Notlagen schneller helfen, indem sie verletzte Menschen erkennen und priorisieren. Der Begriff “Triage-Roboter” beschreibt autonome oder ferngesteuerte Systeme, die mit Kameras, Thermalsensoren und Algorithmen arbeiten, um Lagebilder zu erzeugen und Dringlichkeit zu melden. Dieser Text erklärt, wie solche Systeme funktionieren, welche Nachweise und Grenzen es bis 2025 gibt und welche praktischen Folgen das für Helfer und Planung hat. Leser erhalten konkrete Orientierung zur Technologie, zu Chancen und zu Risiken.
Einleitung
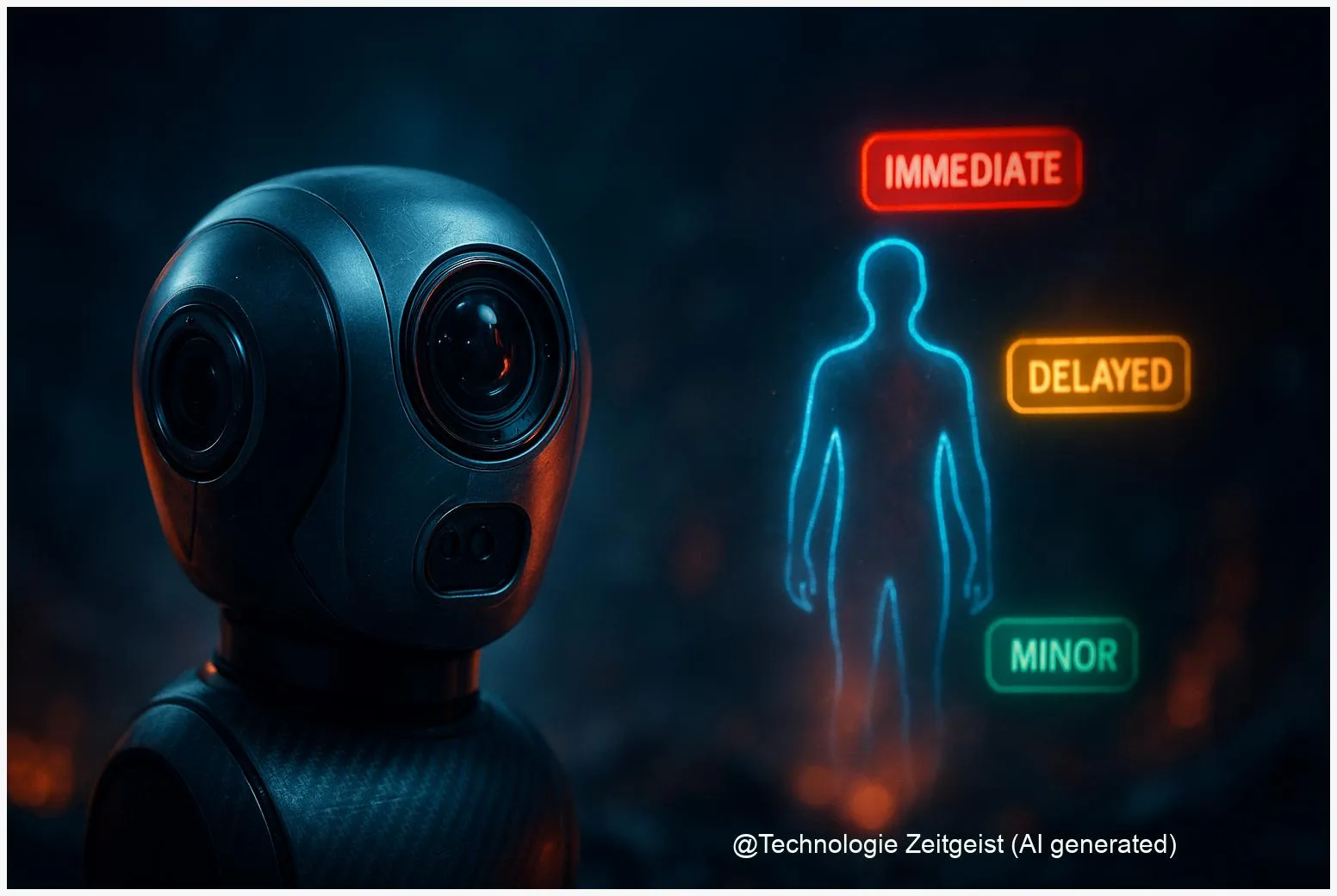
Bei großen Unglücken zählt jede Minute. Noch vor medizinischer Behandlung steht die Frage, wo sich Verletzte befinden und wer am dringendsten Hilfe braucht. Traditionell übernehmen Einsatzkräfte diese Primär‑Triage vor Ort. Triage-Roboter sollen diese Phase ergänzen: Sie suchen Gebiete systematisch ab, markieren Personen und geben Prioritätsabschätzungen ab. In der Praxis bedeutet das nicht, dass Roboter Menschen behandeln, sondern dass sie Informationen schneller und oft in gefährlichen Umgebungen liefern.
Viele Forschungsteams kombinierten in den letzten Jahren Thermalkameras, konventionelle Kameras und Algorithmen für Personenerkennung. Feldtests zeigen vielversprechende Trefferquoten, aber die Studien stammen überwiegend aus kontrollierten Versuchen. Das stellt Fragen nach Verlässlichkeit, Energieversorgung, Datenschutz und Einsatzregeln — Aspekte, die in realen Massenlage‑Szenarien kritisch sind.
Technik: Was ein Triage-Roboter kann
Ein Triage-Roboter verbindet drei Bausteine: Sensorik, Datenverarbeitung und Übertragung. Als Sensoren dienen meist eine RGB‑Kamera (Standardbild), eine Thermalkamera (misst Oberflächentemperatur) und gelegentlich multispektrale Sensoren, die zusätzliche Materialunterschiede sichtbar machen. “Thermalkamera” bedeutet hier, dass das Gerät Wärmestrahlung misst und so Menschen auch bei Dunkelheit oder durch Rauch sichtbar machen kann.
Die Algorithmen beruhen oft auf neuronalen Netzen, das sind Rechenmodelle, die aus vielen einfachen Verarbeitungseinheiten bestehen und Muster in Bildern erkennen. Solche Modelle werden trainiert, damit sie Personen, deren Lage (liegend, sitzend) und manchmal vitale Signale wie Atmungsschwingungen aus Wärmebildern unterscheiden können. Wichtig ist: Modelle lernen aus Beispielen; die Qualität und Vielfalt der Trainingsdaten bestimmt, wie zuverlässig die Erkennung in neuen Situationen ist.
“Thermalbilder zeigen Personen selbst bei schlechter Sicht, doch allein Temperatur ist selten ausreichend — Sensorfusion verbessert Zuverlässigkeit.”
Laborversuche und einige Feldstudien berichten zweistellige Prozentsätze an Erkennungsraten: ein Prototyp erreichte in Tests etwa 74 % Klassifikationsgenauigkeit im Durchschnitt und sehr hohe Treffer für die kritischste Kategorie, laut einer 2023 veröffentlichten Preprint‑Studie. Diese Studie ist von 2023 und damit älter als zwei Jahre; sie bleibt jedoch wichtig, weil sie frühe Ergebnisse und Systemdesigns dokumentiert.
In der Übersicht hilft eine kleine Tabelle, Sensorstärken kurz zu vergleichen.
| Sensor | Stärken | Schwächen |
|---|---|---|
| RGB‑Kamera | hohe Auflösung, Farbinfos | schwach bei Dunkelheit/Rauch |
| Thermalkamera | erkennbar bei Low‑Light, durch Rauch | Anfällig für Störwärme, Materialverdeckung |
| Multispektral | hilft bei Materialunterscheidung | teurer, größere Datenmengen |
Messgrößen, die für die Evaluation wichtig sind, heißen Sensitivity (Trefferquote), Specificity (Falschalarmrate), Lokalisierungsfehler und Latenz. In Testumgebungen erreichen Thermalsysteme oft hohe Trefferquoten (in Studien bis 90–99 %), doch diese Werte fallen in komplexen, realen Trümmerfeldern erfahrungsgemäß ab.
Einsatzbeispiele: Drohnen, Bodenroboter und Kombinationssysteme
In der Praxis kommen zwei Plattformtypen am häufigsten vor: Flugroboter (Drohnen) und bodengebundene Roboter (z. B. legged UGVs). Drohnen sind schnell und erreichen große Bereiche; Bodensysteme können näher an Opfer heran und liefern stabilere Sensoraufnahmen. Häufigster Ansatz ist eine Kombination: Drohnen für schnelle Übersicht, Bodenroboter für das gezielte Nähern und detailliertere Messungen.
Feldstudien von 2024 zeigen, dass Thermaldrohnen in Tests sehr hohe Detektionsraten lieferten, vor allem bei Dämmerung und in verrauchten Bereichen. Die Erkennungsalgorithmen nutzten oft angepasste Objekterkennungsnetze und Trackingverfahren, um Personen über mehrere Frames zu verfolgen. Das reduziert Fehlalarme, wenn sich eine Wärmequelle nur kurz zeigt.
In einem Projekt wurde ein quadrupeder Roboter mit multimodaler Sensorik demonstriert: Er konnte Personen lokalisieren, einfache Fragen stellen und Prioritäten vorschlagen. Solche Systeme können helfen, Ersthelfer zu informieren, bevor sie gefährliche Bereiche betreten. Wichtig zu betonen: Bis 2025 sind die meisten derartigen Demonstrationen noch prototypisch; die robuste Integration in reguläre Rettungsabläufe steht noch aus.
Praxisnahe Einsätze erfordern klare Operator‑Workflows: Wer bestätigt einen gemeldeten Fund? Welche Maßnahmen gelten bei Fehlinformationen? Feldtests zeigen, dass Akzeptanz bei Einsatzkräften steigt, wenn Roboter überschaubare, verlässliche Informationen liefern statt komplexer Wahrscheinlichkeitsverteilungen.
Chancen und Risiken in der Praxis
Chancen sind konkret: Roboter können gefährliche Orte betreten, Suchzeiten verkürzen und mehr Fläche pro Zeit abdecken. Sie sind besonders nützlich bei Nacht, in verrauchten Umgebungen oder bei Instabilität der Infrastruktur. In mehreren Studien lag die kombinierte Missions‑Erfolgsrate multimodaler Systeme in optimierten Szenarien nahe bei 90 %.
Risiken bestehen in methodischen Grenzen und operativen Bedingungen. Viele Studien nutzen synthetische Erweiterungen von Datensätzen, um seltene Fälle zu modellieren. Solche Verfahren können Overfitting begünstigen: Ein Algorithmus performt gut auf Testdaten, aber schlechter im echten Trümmerfeld. Hinzu kommen Umweltfaktoren: Überhitzte Motoren, Funklöcher, Trümmer, Tiere oder reflektierende Oberflächen führen zu Fehlalarmen.
Ethische und rechtliche Fragen sind zentral: Datenschutz berührt die Erfassung und Speicherung von Bildern in öffentlichen Einsätzen; Verantwortungsfragen betreffen Fehlalarme und fehlerhafte Priorisierungen. Klare Regeln müssen definieren, wie Systeme qualitätsgesichert werden und wer die finale Entscheidung trifft. Experten empfehlen verpflichtende Trainings für Einsatzkräfte und standardisierte Prüfprotokolle vor tatsächlichem Einsatz.
Technisch ist Energie ein limitierender Faktor: Drohnen und Bodenroboter haben begrenzte Laufzeiten, und verlustbehaftete Kommunikation reduziert die Reichweite automatischer Funktionen. Deshalb ist das Design von Missionen — etwa Abdeckungspläne, Ladeinfrastruktur und redundante Kommunikationskanäle — genauso wichtig wie die Erkennungssoftware.
Ausblick: Was als Nächstes kommt
Die Entwicklung geht in Richtung standardisierter Feldbenchmarks, offener Datensätze und multimodaler Sensorfusion. Empfehlungen aus jüngeren Analysen raten zu reproduzierbaren Feldprüfungen mit definierten MCI‑Parcours, um Vergleichbarkeit zu ermöglichen. Solche Benchmarks würden auch helfen, fragile Forschungsergebnisse aus kontrollierten Laborumgebungen praktikabler zu machen.
Auf technischer Ebene werden niedrigere Latenzen, effizientere Modelle und bessere Energieverwaltung die Einsatzdauer verlängern. Softwareseitig bleibt Sensorfusion ein Schlüssel: Kombinationen aus Thermik, RGB und multispektralen Daten reduzieren Fehlalarme und erhöhen die Robustheit gegenüber Störwärmequellen.
Institutionell zeichnet sich ab, dass Integration nur gelingt, wenn Rettungsorganisationen, Entwickler und Regulierer gemeinsam Standards und Trainings entwickeln. Pilotprojekte mit transparenten Protokollen, Offenlegung von Fehlerquoten und unabhängigen Feldtests sind dafür zentral. Solche Schritte erhöhen Vertrauen und ermöglichen eine graduelle Einbindung in echte Einsätze.
Für interessierte Leser: Wer sich beruflich oder ehrenamtlich einbringen möchte, sollte Grundkenntnisse zu Thermalkameras, Zuverlässigkeitskennzahlen und rechtlichen Rahmenbedingungen erwerben; das stärkt die Zusammenarbeit mit Entwicklungsteams.
Fazit
Triage-Roboter können die erste Phase der Hilfe sichtbarer und schneller machen, indem sie Opfer lokalisieren und ihre Dringlichkeit vorab einschätzen. Bis Ende 2025 zeigen Studien und Feldversuche vielversprechende Ergebnisse, insbesondere für Thermaldrohnen und multimodale Systeme. Gleichzeitig bestehen deutliche Limitierungen: viele Erkenntnisse stammen aus kontrollierten Tests, Energie und Kommunikation begrenzen den Einsatz, und ethisch‑rechtliche Fragen sind noch offen. Das Fazit ist nüchtern: Technologie kann ein wertvoller Helfer sein, ersetzt aber nicht die menschliche Entscheidung und bedarf transparent geprüfter Standards.
Diskutiere diese Technik gern weiter und teile den Artikel, wenn er hilfreich war.
Schreibe einen Kommentar